Arduino Propeller LED Display Leave a comment
You have seen Propellers in Aircrafts or in marine ships, if not in real then in movies for sure. In this session we are going to design a Propeller Display with Arduino, LEDs and a DC motor. In this Propeller Display, text will appear to be rotating in propeller fashion in a circular shape.
The propeller display is in a way like LED Matrix. It contains 8 LEDs (Light Emitting Diodes) which are arranged in the form of an 8*1 matrix (8 rows and 1 column). They are arranged in the form of ladder one over the other. These 8 LED can be made to display any content like text, numbers, symbolsetc. This is achieved by Perception of Vision (POV), in which many still images are moved quickly one by one in a sequence, which gives a perception of animation or a moving image. How this is done is explained in the tutorial given below.
Components Required
- Arduino Uno
- DC Motor
- +3.6V LI-ION battery
- LED (8 pieces)
- 1KΩ resistor (8 pieces)
Construction of Propeller Display:
Support the top of Motor to equate the uneven bumps. I used a dot board over it and used quick glue again to stick it with DC motor.

Attach the LI-ION battery on top. If you don’t have LI-ION battery of same size, just leave it. After that take each LED and test it with button cell or any other source. Then take some resistors and solder them with LEDs as per the picture and circuit diagram shown below.

Connect the soldered LEDs and resistors with Arduino UNO as shown in below figure and circuit diagram.


Mount the UNO on to the top of DC MOTOR and secure it with the help of cello tape to finish the setup. So the final Propeller setup will look like below:

Circuit and Working Explanation:
Circuit of Arduino controlled POV Display is very simple, we simply connected 8 LEDs with Arduino Uno as per circuit diagram below.
PORTD, PIN0 ——————LED8 POSITIVE TERMINAL
PORTD, PIN1 —————— LED7 POSITIVE TERMINAL
PORTD, PIN2 —————— LED6 POSITIVE TERMINAL
PORTD, PIN3 —————— LED5 POSITIVE TERMINAL
PORTD, PIN4 —————— LED4 POSITIVE TERMINAL
PORTD, PIN5 —————— LED3POSITIVE TERMINAL
PORTD, PIN6 —————— LED2 POSITIVE TERMINAL
PORTD, PIN7 —————— LED1POSITIVE TERMINAL

Like we add more columns in 8×8 LED Matrix to extend the display, in the same way instead of adding more LED COLUMNS we move the first LED COLUMN to the second LED COLUMN place by using the motion of DC MOTOR.
In order to understand the whole situation, say we want ‘A’ to be displayed by the propeller display. Consider the LED ‘needle’ is at POSITION1 at first as shown in figure below. LED Needle is the Column of 8 LEDs.

Now we will power the motor and it will start running.
At t=0ms: the needle will be at POSITION 1. At this position all the eight LEDs, from TOP LED (MSB) to BOTTOM LED (LSB), are powered on.
At t=1ms: the needle will be at POSITION 2. Same as Position 1, at this position all the eight LEDs, from TOP LED (MSB) to BOTTOM LED (LSB), are powered on.
At t=2ms: the needle will be at POSITION 3. At this position only LED7, LED6 & LED3 stay ON and remaining LEDs are turned OFF.
At t=3ms: the needle will be at POSITION 4. Same as Position 3, at this position only LED7, LED6 & LED3 stay ON and remaining LEDs are turned OFF.
At t=4ms: the needle will be at POSITION 5. Same as Position 3 & 4, at this position only LED7, LED6 & LED3 stay ON. Remaining LEDs are turned OFF.
At t=5ms: the needle will be at POSITION 6. At this position all the eight LEDs are again powered on, TOP led (MSB) to BOTTOM led (LSB) are turned ON.
At t=6ms: the needle will be at POSITION 7. Same as Position 6, at this position all the eight LEDs remain on.
As explained above, we will turn ON appropriate LEDs at the appropriate Needle Positions to display the necessary character. If the speed of movement of needle is slow we can see each LED column separately. But when the speed of motor is high and needle is moving too fast then the display will be seen as continuously showing “A” character.
Programming Explanation:
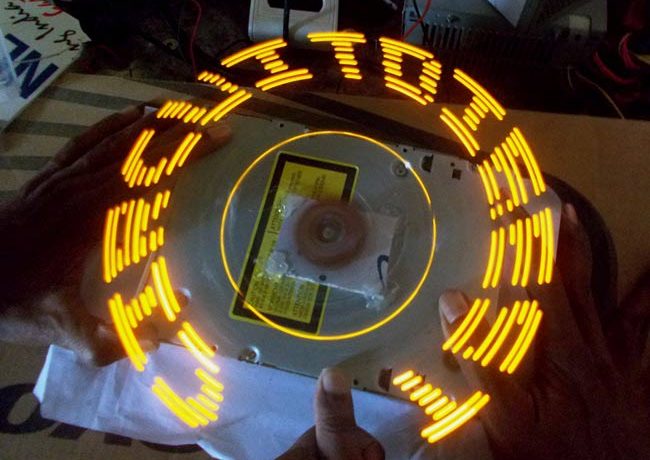
We have programmed the Arduino to power the appropriate LED at appropriate times while rotating so that LED column will show the text “CIRCUIT DIGEST” in circular position.
Programming of the Propeller display is easily understandable. A Char Array of 26×8 has been taken as volatile char ALPHA[26][8]. This Array consists 8 positions of the needle to display each of the 26 alphabets that makes it array of 26×8. 26 rows in Array represent the 26 alphabets and 8 columns in each row represent the eight position of needle to display the character while rotating. Now each cell consist a binary number which represents the on/off status of 8 LEDs in a particular position of Needle. Remember needle here refers to line of 8 LEDs connected to Arduino as explained above.
Now you just need to rotate the DC motor and use a ‘for loop’ with eight iterations to display a character. Like if you want to display 10 characters then you need to run 10 ‘for loops’ with eight iterations in each. So we have used 13 for loops to display the text CIRCUIT DIGEST. Check the full program code below with a demonstration video.
So this is how you can create a beautiful Persistence of Vision (POV) illusion with Arduino like a Text is rotating like a Propeller.
Arduino Code
volatile char ALPHA[26][8]={{0,0b01111111,0b11111111,0b11001100,0b11001100,0b11001100,0b11111111,0b01111111}, {0,0b00111100,0b01111110,0b11011011,0b11011011,0b11011011,0b11111111,0b11111111} {0,0b11000011,0b11000011,0b11000011,0b11000011,0b11100111,0b01111110,0b00111100},
{0,0b01111110,0b10111101,0b11000011,0b11000011,0b11000011,0b11111111,0b11111111} {0,0b11011011,0b11011011,0b11011011,0b11011011,0b11011011,0b11111111,0b11111111} {0,0b11011000,0b11011000,0b11011000,0b11011000,0b11011000,0b11111111,0b11111111},
{0b00011111,0b11011111,0b11011000,0b11011011,0b11011011,0b11011011,0b11111111,0b11111111}, {0,0b11111111,0b11111111,0b00011000,0b00011000,0b00011000,0b11111111,0b11111111},
{0b11000011,0b11000011,0b11000011,0b11111111,0b11111111,0b11000011,0b11000011,0b11000011}, {0b11000000,0b11000000,0b11000000,0b11111111,0b11111111,0b11000011,0b11001111,0b11001111},
{0,0b11000011,0b11100111,0b01111110,0b00111100,0b00011000,0b11111111,0b11111111} {0b00000011,0b00000011,0b00000011,0b00000011,0b00000011,0b00000011,0b11111111,0b11111111},
{0b11111111,0b11111111,0b01100000,0b01110000,0b01110000,0b01100000,0b11111111,0b11111111}, {0b11111111,0b11111111,0b00011100,0b00111000,0b01110000,0b11100000,0b11111111,0b11111111},
{0b01111110,0b11111111,0b11000011,0b11000011,0b11000011,0b11000011,0b11111111,0b01111110}, {0,0b01110000,0b11111000,0b11001100,0b11001100,0b11001100,0b11111111,0b11111111},
{0b01111110,0b11111111,0b11001111,0b11011111,0b11011011,0b11000011,0b11111111,0b01111110}, {0b01111001,0b11111011,0b11011111,0b11011110,0b11011100,0b11011000,0b11111111,0b11111111},
{0b11001110,0b11011111,0b11011011,0b11011011,0b11011011,0b11011011,0b11111011,0b01110011}, {0b11000000,0b11000000,0b11000000,0b11111111,0b11111111,0b11000000,0b11000000,0b00000000},
{0b11111110,0b11111111,0b00000011,0b00000011,0b00000011,0b00000011,0b11111111,0b11111110}, {0b11100000,0b11111100,0b00011110,0b00000011,0b00000011,0b00011110,0b11111100,0b11100000},
{0b11111110,0b11111111,0b00000011,0b11111111,0b11111111,0b00000011,0b11111111,0b11111110} {0b01000010,0b11100111,0b01111110,0b00111100,0b00111100,0b01111110,0b11100111,0b01000010},
{0b01000000,0b11100000,0b01110000,0b00111111,0b00111111,0b01110000,0b11100000,0b01000000}, {0b11000011,0b11100011,0b11110011,0b11111011,0b11011111,0b11001111,0b11000111,0b11000011}};
void setup()
{
DDRD = 0xFF;
//a,b,c,d,e,f,g,…z
}
void loop()
{
for (int i=7;i>0;i–)
{
PORTD = ALPHA[2][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[8][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[17][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[2][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[20][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[8][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[19][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[3][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[8][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[6][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[4][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[18][i];
delay(1);
PORTD=0;
}
delay(2);
for (int i=7;i>0;i–)
{
PORTD = ALPHA[19][i];
delay(1);
PORTD=0;
}
delay(19);
}